Control y robótica 4º E.S.O.
Control con el driver L293D
El circuito integrado L293D es uno de los más utilizados en el control de motores de corriente continua.
DISTRIBUCIÓN DE CONTACTOS
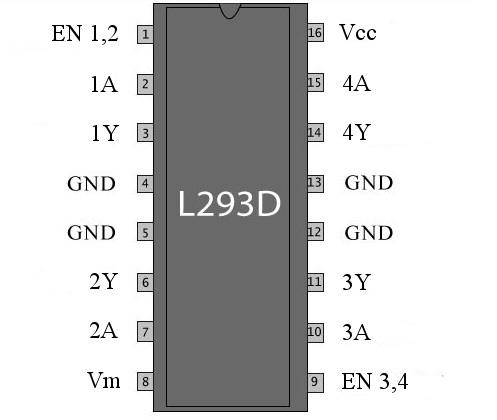
Tiene dieciséis patillas, cuya distribución te doy en la tabla siguiente:
| NÚMERO | NOMBRE | FUNCIÓN |
| 1 | 1,2 EN | Activa las líneas 1 y 2 |
| 2 | 1A | Entrada 1 |
| 3 | 1Y | Salida 1 |
| 4 | GND | Masa |
| 5 | GND | Masa |
| 6 | 2Y | Salida 2 |
| 7 | 2A | Entrada 2 |
| 8 | Vm |
Alimentación del motor |
| 9 | 3,4 EN | Activa las líneas 3 y 4 |
| 10 | 3A | Entrada 3 |
| 11 | 3Y | Salida 3 |
| 12 | GND | Masa |
| 13 | GND | Masa |
| 14 | 4Y | Salida 4 |
| 15 | 4A | Entrada 4 |
| 16 | Vcc | Alimentación del circuito integrado |
TABLA DE VERDAD DEL CIRCUITO
| INPUTS | OUTPUT | |
| A | EN | Y |
| ALTO | ALTO | ALTO |
| BAJO | ALTO | BAJO |
| X | BAJO | ALTA IMPEDANCIA |
Teniendo en cuenta esto, conectaremos los dos terminales de nuestro motor a las líneas 1 y 2 del L293D, por ejemplo.
Si hacemos eso, podremos poner los terminales 1A y 2A en 0 ó en 1, lo cual producirá el siguiente efecto (siempre que EN 1,2 esté habilitada):
| 1A | 1Y | 2A | 2Y | MOTOR |
| 0 | 0 | 0 | 0 | PARO |
| 0 | 0 | 1 | 1 | GIRO A DERECHAS |
| 1 | 1 | 0 | 0 | GIRO A IZQUIERDAS |
| 1 | 1 | 1 | 1 | PARO |
El driver suele incorporarse a diversas placas para la conexión a Arduino de una forma más sencilla:
