Arduino para 4º de ESO
Pinza robótica con servos (LEANTEC)
#include <Servo.h>
Servo servomuneca; //Creamos el servo de la muñeca
Servo servopinza; // Creamos el servo de la pinza
int angulomuneca = 0;//Creamos la variable angulomuneca
int angulopinza = 0;//Creamos la variable angulopinza
int valorPotenciometro1 = 0;//Creamos la variable valorPotenciometro1
int valorPotenciometro2 = 0;//Creamos la variable valorPotenciometro2
void setup()
{
Serial.begin(9600);//Inicializamos el puerto serie
servomuneca.attach(8);//Definimos el pin de servomuneca
servomuneca.write(90);//Ponemos el servo a 90 grados
servopinza.attach(9);//Definimos el pin de servopinza
servopinza.write(90);//Ponemos el servo a 90 grados
delay(2000);//Esperamos 2 segundos
}
void loop()
{
//Lee el valor del potenciometro
valorPotenciometro1 = analogRead (0);//Leemos el valor del poten. 1
valorPotenciometro2 = analogRead (1);//Leemos el valor del poten. 2
/*Mapeamos el valor de los potenciometros para que el valor leido
siempre este entre 10 y 180 grados y lo guardamos en la variables
declaradas para almacenar los ángulos*/
angulomuneca = map (valorPotenciometro1, 0, 1023, 10, 180);
angulopinza = map (valorPotenciometro2, 0, 1023, 10, 180);
servomuneca.write(angulomuneca);//Damos al servo el ángulo resultante
servopinza.write(angulopinza);//Damos al servo el ángulo resultante
}
Vamos a utilizar el kit proporcionado por la empresa sevillana LEANTEC, disponible en este enlace
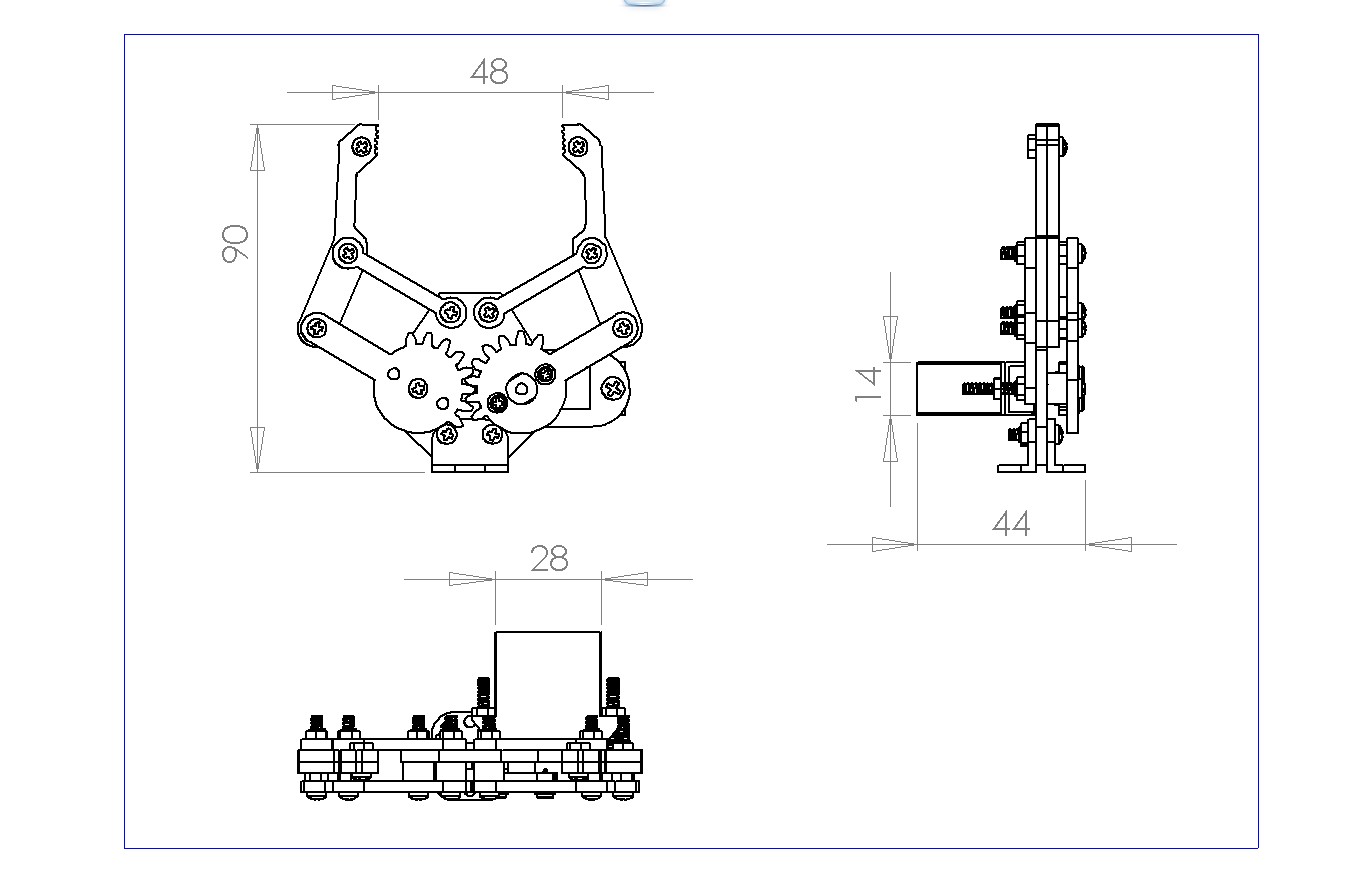
DIMENSIONES DE LA PINZA
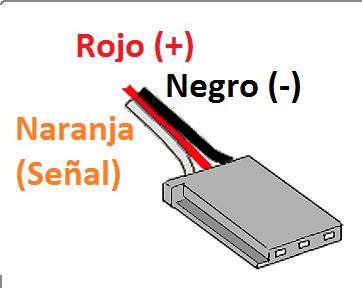
CONEXIÓN DEL SERVO
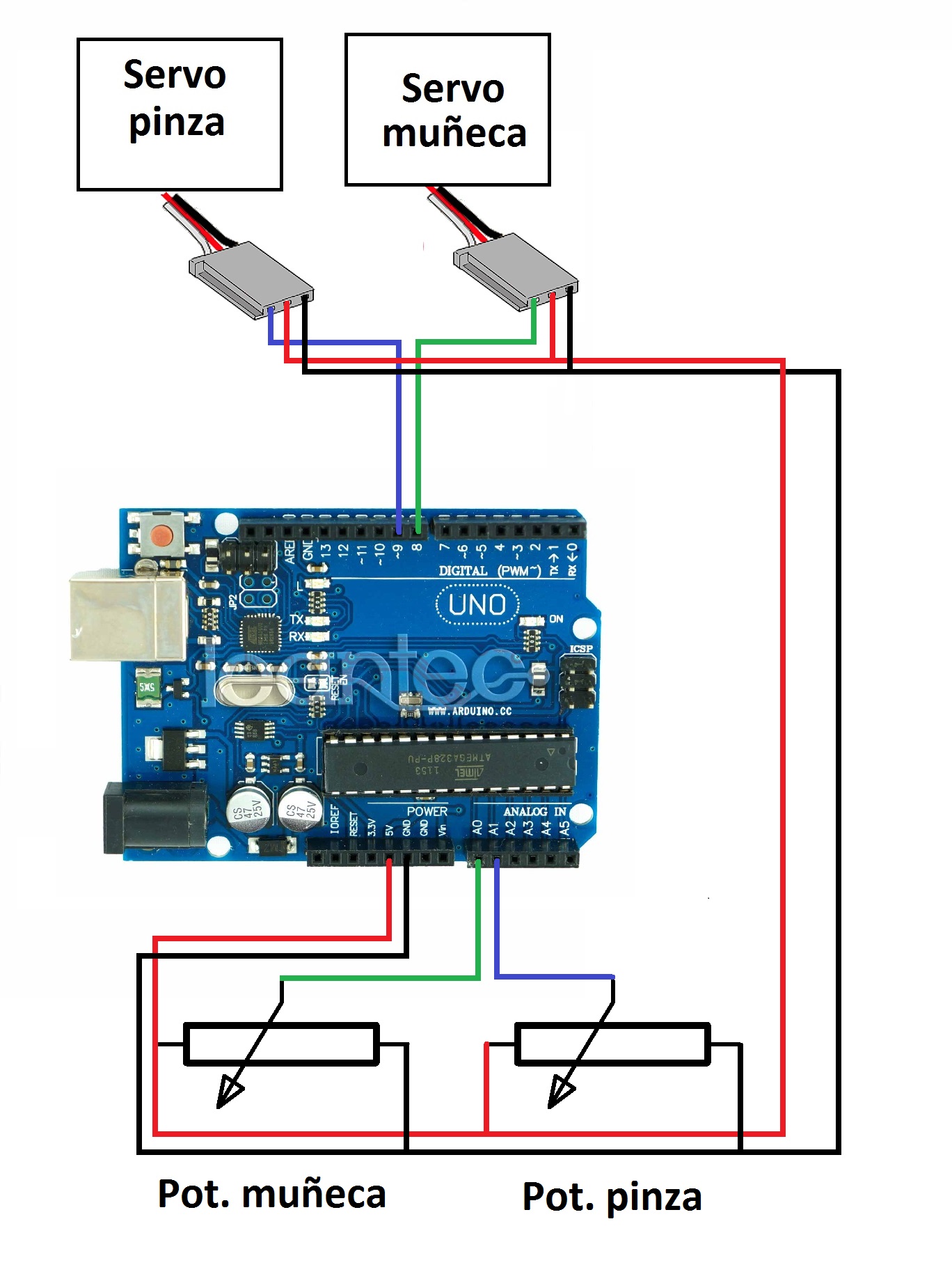
ESQUEMA DE MONTAJE
Obra publicada con Licencia Creative Commons Reconocimiento No comercial Compartir igual 4.0